by B Cantin | Mar 8, 2016 | Kitchissippi-Delta
As I detailed in my last post – The Kitchissippi Robotics 45 Degree Linear Carriage (A brief history) my unique linear carriage design has gone through off-and-on revision and evolution over the past two years or so since I first came up with the idea.
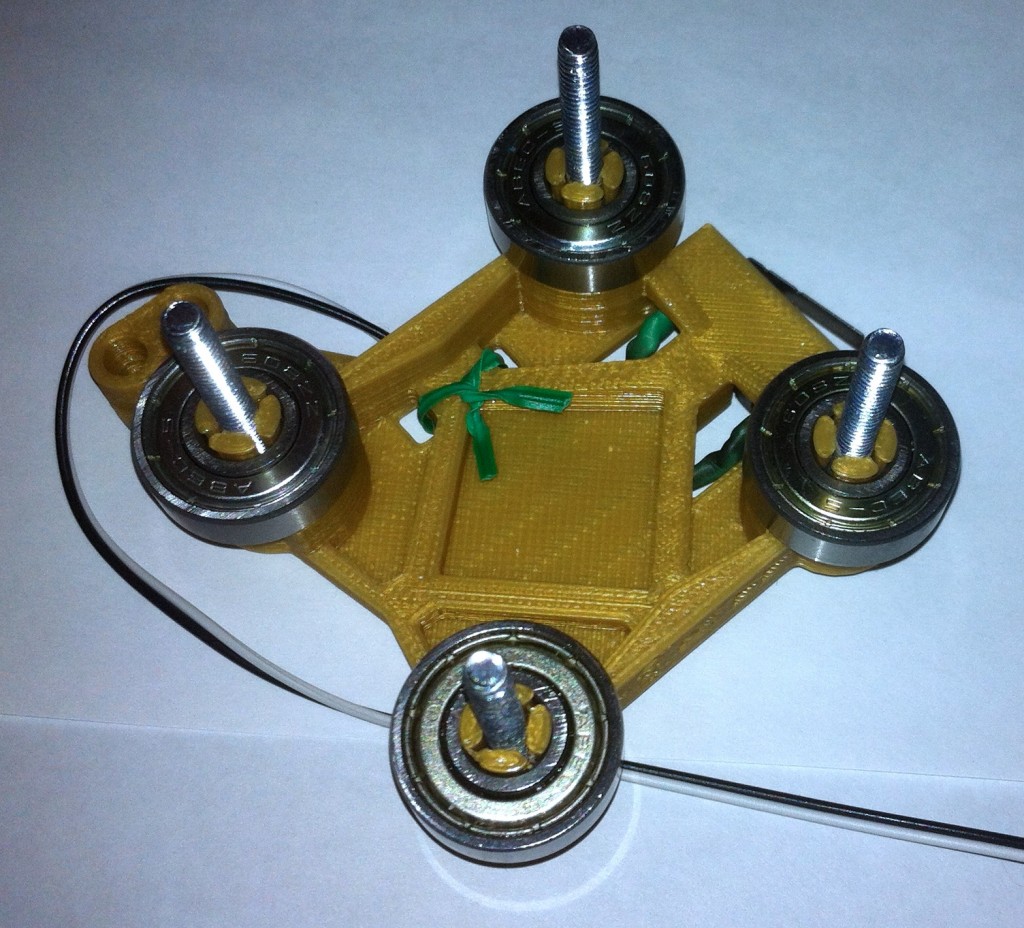
The latest revision is certainly the most refined – it retains the elegantly simple design of the previous conceptual parts – eight bearings constrained with four bolts around a steel tube at a 45 degree angle.
What I added in this version is adjustable tensioning of the bearings against the tubing. The major drawback of using bearing holders that clipped the bearing in place was that it was nearly impossible to adjust the tension and keep things squared away, and the bearings wanted to shift. They need to be constrained on both sides.
The problem with using plastic spacers is that it’s hard to get perfect accuracy in the thickness of them – the first layer could get squashed down a bit into the print bed and change the height of the spacer from the original CAD design.
I mostly used metal washers as spacers but they have the problem of being able to only add or subtract the spacing in 1mm increments. Getting the bearing spacing against the tubing was terribly inaccurate using SketchUp. They were either too loose or too tight and gouging the metal.
I redesigned the parts in OpenSCAD and parametrically adjusted the math until I got a more ideal design. Then I assembled them using rubber spacers to allow for fine tuning of the spacing between the bearings and the tubing.

This seems to be the most winning combination of the design so far – it rolls stiffer and straighter against the tubing while still being gentle enough to not damage the tubing.
I’ve also spaced the lower bearings further apart and more inwards to provide a more stable rolling platform.
Also of note, I ditched the separated bar design of the outer carriages from the previous version. Once the arm joints were fully stabilized the stresses of the delta mechanism cased them to flex.
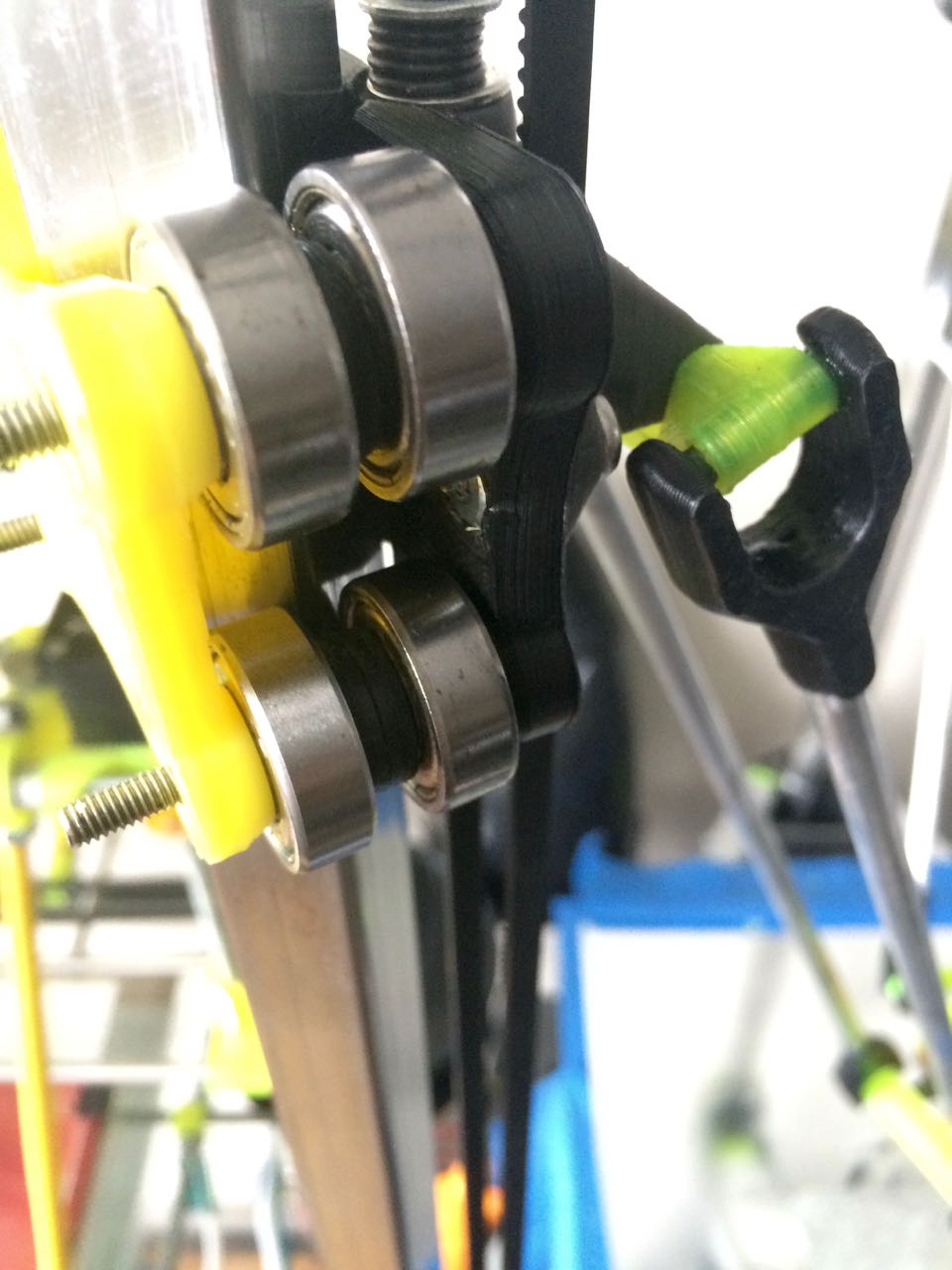
Above is the X tower carriage which is working well. I am in the process of printing the last few pieces for the Y and Z towers.
Ignore the length of bolt ticking out of the carriage – I thought I had the appropriate N06 bolts on hand for these but cannot seem to find then. I believe I may have used them in another project, so I grabbed some M4x40mm bolts to put it together. They are similarly sized and it will do until I can get to the hardware store and get the slightly shorter bolts I had intended to use.
For comparison here is the previous working design that was less stable:

by B Cantin | Mar 8, 2016 | Gemini 3D Printer, Kitchissippi-Delta
This linear carriage design is something I have been toying with for several years now.
It all started with having picked up a bulk lot of 608zz skate bearings with the intent of making a Rostock or similar delta printer some day, but mostly because I needed a few for my Mendel and at 30 cents a bearing for a hundred bearing I felt I couldn’t pass it up – I’d find a use for them.
I was actually working on the early proof of concepts for the K02 corexy printer I wanted to build when I came up with the idea of turning the square tubing 45 degrees. I had picked up some stock aluminum 3/4″ tubing at the hardware store to play around with and was trying to work out a simple method of utilizing them as both the frame and the linear guide using the skate bearings.
The main challenge was that the bearings need to be preloaded to an extent and most methods of getting them tensioned against the tube and constrained well enough to function as a linear guide required a great number of bearings. Such a mechanism gets quite large when dealing with skate bearings and typically requires less common bearings that are smaller.
I have no record of how long I spent just rolling bearings in various configurations along the aluminum stock and daydreaming until I stumbled across this trick, which I believe is unique to myself, of pinching an edge of the tube between two skate bearings to form a point on the linear guide. I recall that I printed various small plastic parts to test my various ideas which was an introduction to designing custom parts in SketchUp as well as proving the usefulness of rapid prototyping that can be achieved with a 3D printer. Any idea I had could be test implemented within a matter of minutes or at worst hours depending on the size of the part.
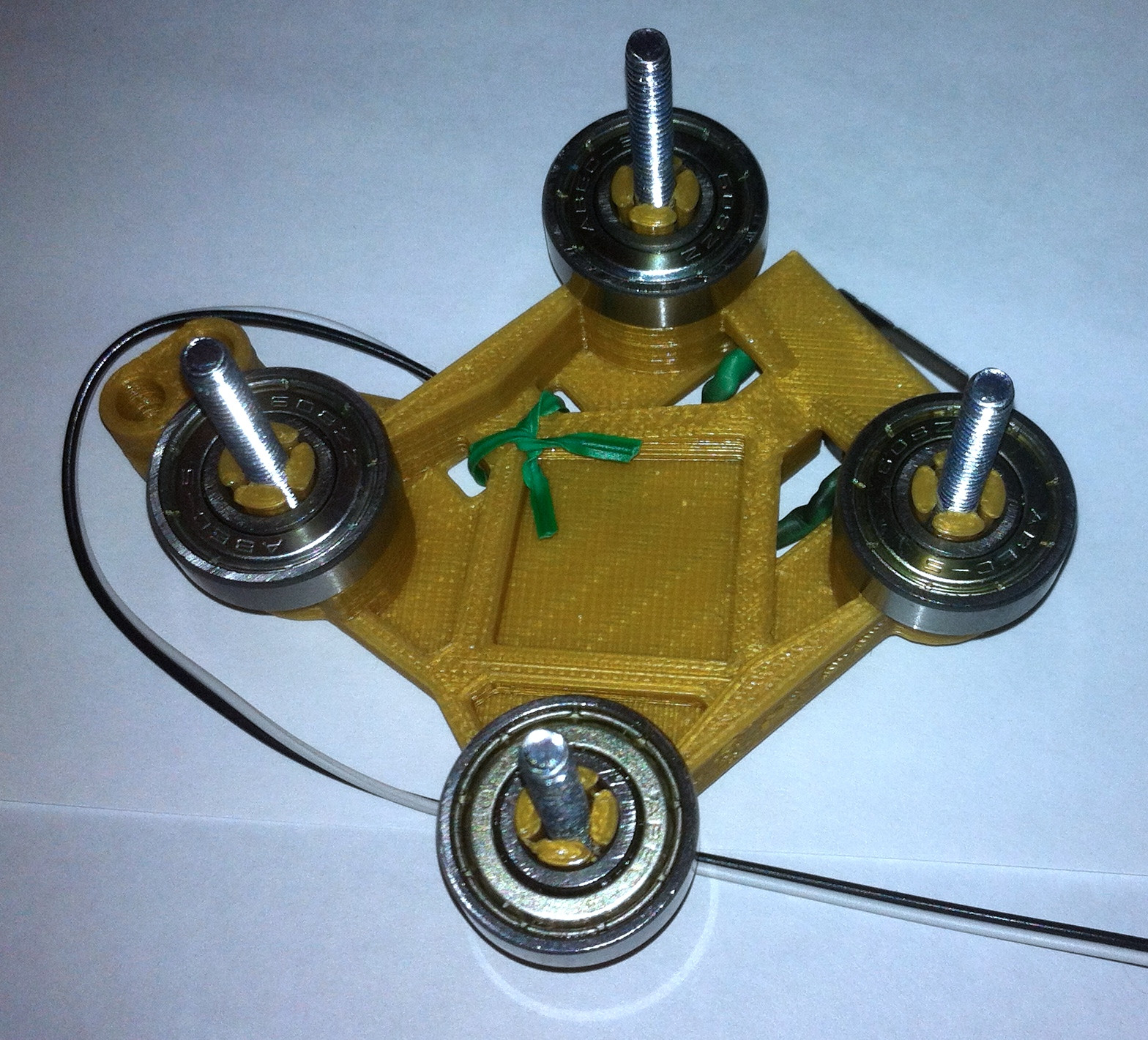
I quickly whipped up a linear carriage design that used three bearings mounted on a plate and a mirror of that held together with four bolts to form the linear carriage. I expanded on this and built a corexy stage with crude but workable filament drive made from reinforced fishing line.
This is an early prototype of the design, intended to be used with a CoreXY mechanism:

It worked fairly well and was able to plot out shapes reasonably accurate from g-code output from Slic3r. I had some initial concerns about the longevity of the soft extruded aluminum tubing verses the hardened steel edges of the skate bearings, as did those I shared the concept with on the #reprap irc channel.
After about 10 hours of running the mechanism it became apparent that the bearings tightened down to the point they’d be accurate linear mechanisms was eating deep gouges into the tubing and would need to be constantly tightened (by pulling the plates closer together) until there was going to be no tubing left.
Here is a picture of an early test build of the design:
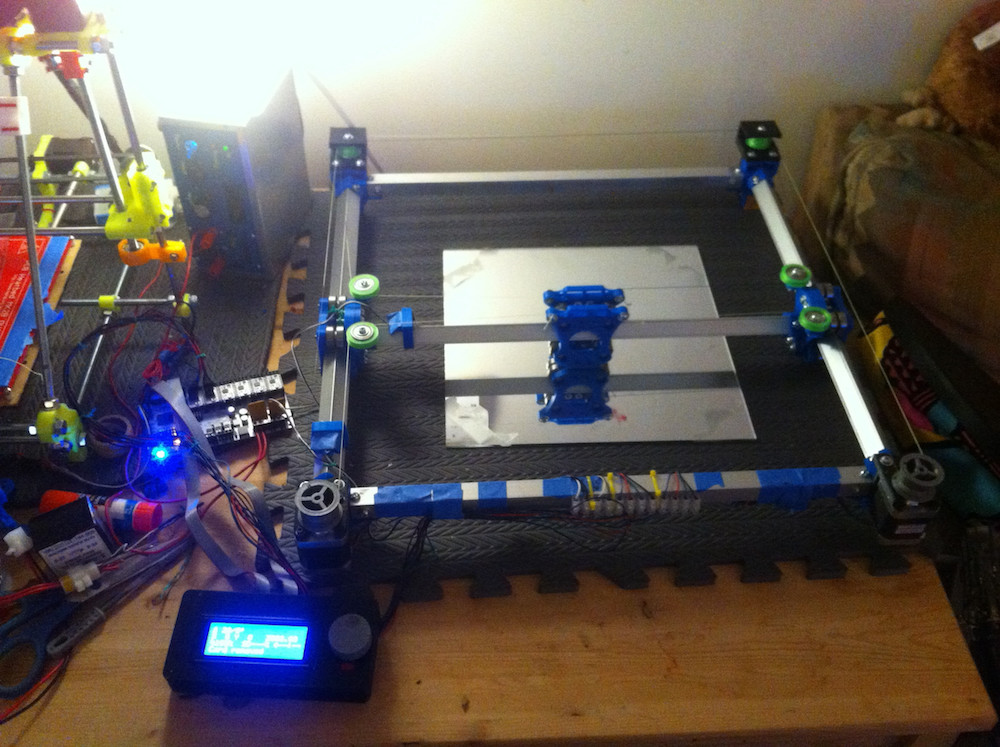
There are issues with the overall CoreXY mechanism shown, there are non parallel drive lines at the rear which would cause accuracy issues over the course of a print. It’s running on a RUMBA controller board and powered by my home made 12v lab supply, sitting beside an earlier build of my trusty Mendel. This is early in the testing and the aluminum tubing has yet to be eaten by the carriages. I’d already switched from a 3-per-side bearing system to a 4-per-side bearing system by this point to deal with binding issues caused by the stresses of the tensioned drive mechanism.
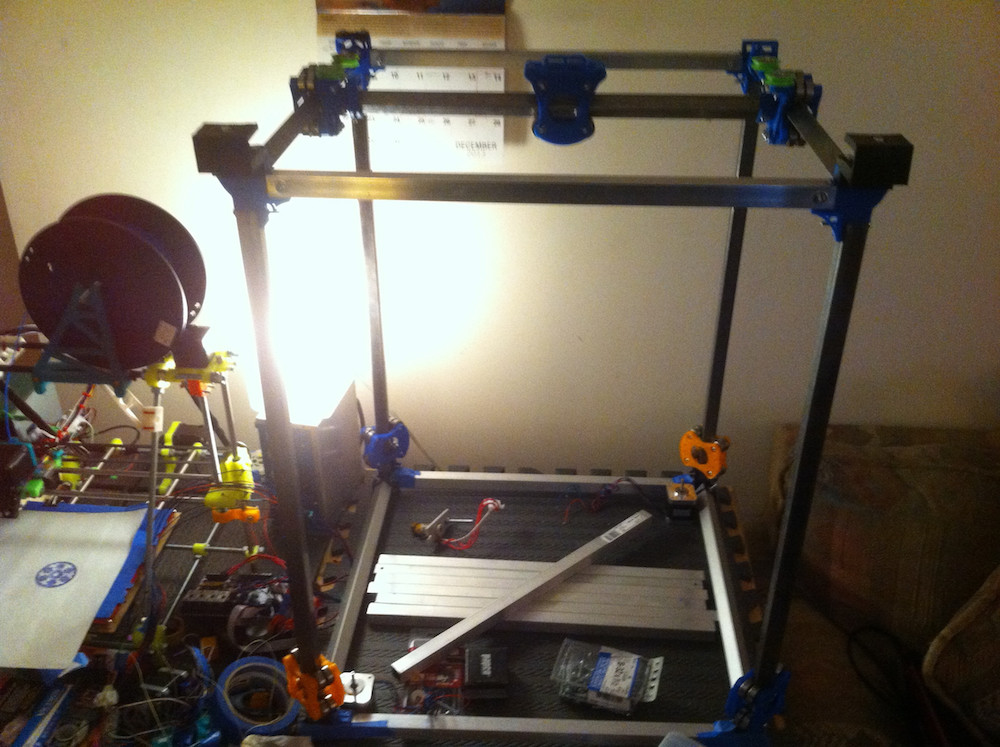
Work proceeded rapidly and by December of 2013 I had the above mechanism in place with steel tubes instead of aluminum on the moving axises and some ideas as to how to attempt a Z axis. The drawing on the piece of paper sitting on the Mendel’s bed was done by the steel version of the gantry and shows how much this concept dwarfed it.
I got so far as to mocking up a few Z axis designs for the CoreXY before I finally had to admit a bit of defeat that the moving weight of the carriages and the steel cross bar, as well as the Z axis variations were not going to meet my goals of a fast large format 3D printer. It worked, but it was going to be a slow machine – and I was not entirely convinced the simple filament drive system was going to be accurate without some serious reconsiderations. This project had started in late 2013 and I had started to question of the wisdom of filament drives in spring of 2014. GT2 timing belts were only just starting to flood the market, there were a lot of us playing with filament drives up to that point and running into certain concerns about positional accuracy with the windings on the spools. Timing belts were becoming cheap enough that the price was comparable to fishing line that was strong enough for RepRap usage and comes with easier repeatable motion.
I had one last concept to try before I gave up on the big CoreXY machine – I wanted to make the carriages thin and remove the extra washers that I had been using as spacers between the two halves of the carriage. Above is a prototype of a snap-fit bearing holder system with an integrated end-stop and drag chain holder. This was not easy to design in SketchUp and I started to consider learning OpenSCAD around this time. The snap fit bearing holders were also a bust – the bearings really need to be constrained around their hubs from both sides in order to make this system work. Since it’s a unique concept, I wouldn’t have known unless I tried.
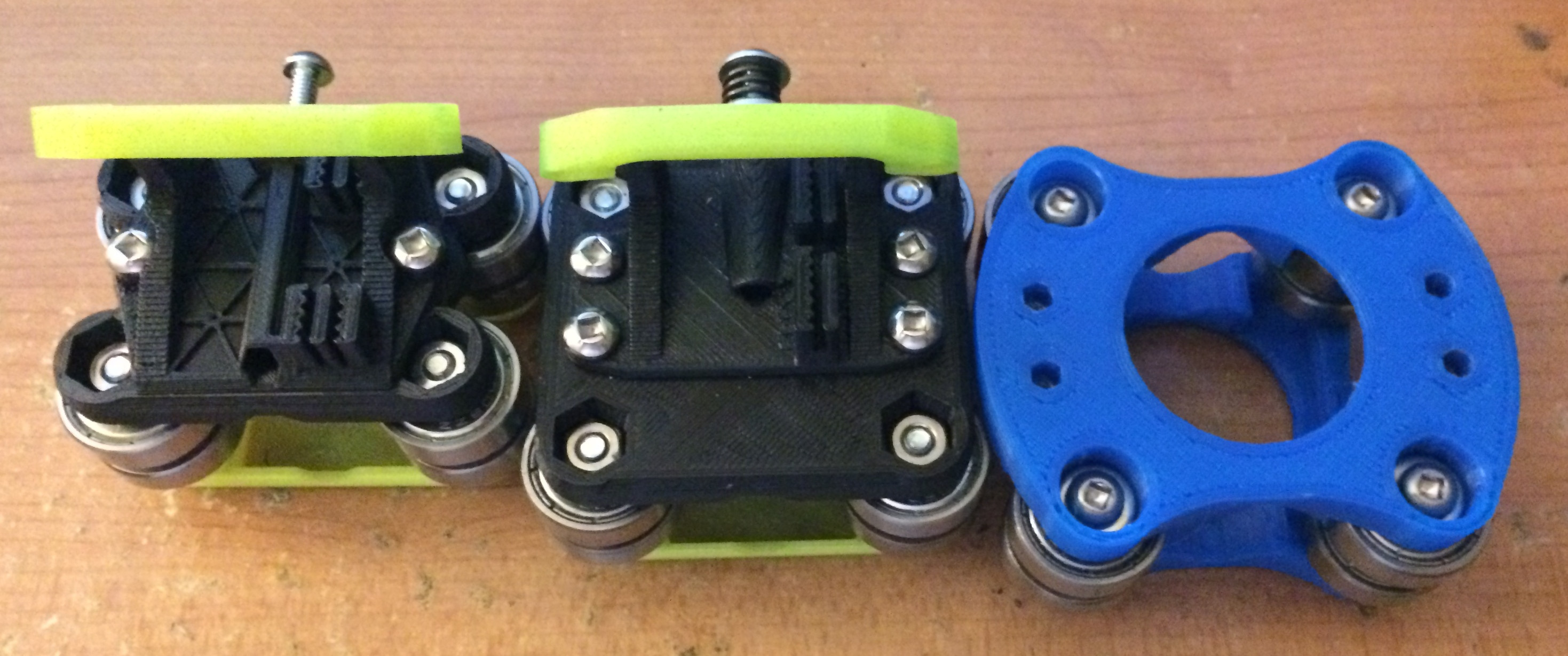
I decided there was going to have to be a better way to build a CoreXY printer, but thought the linear carriage would be particularly suited to a Delta style printer mechanism. Below is a side-by-side comparison of how the K02 mechanism became the K03 mechanism that I was using for the past 2 years. (right to left)

The final version on the left turns out to not be that final. It was an exercise in minimalism which carried onto my next project, the very first version proof-of-concept version of the Gemini 3D printer. Much like the first Gemini build, it proved that you can indeed building things too thin with plastic. The linear mechanism shown above did work for a time, but the printer ran into other problems and I got focused on other things, such as the Gemini.
It’s worth noting that the leftmost mechanism was still in place in the past week when I got the K03 Delta running again. Only the swivel and adapter portion were replaced.
by B Cantin | Mar 8, 2016 | Kitchissippi-Delta
It’s been a busy week so I’ve not had time to detail my progress, but my K03 – Kitchissippi Delta 3D Printer is back up and running and better than ever with the newly designed OpenSCAD parts.
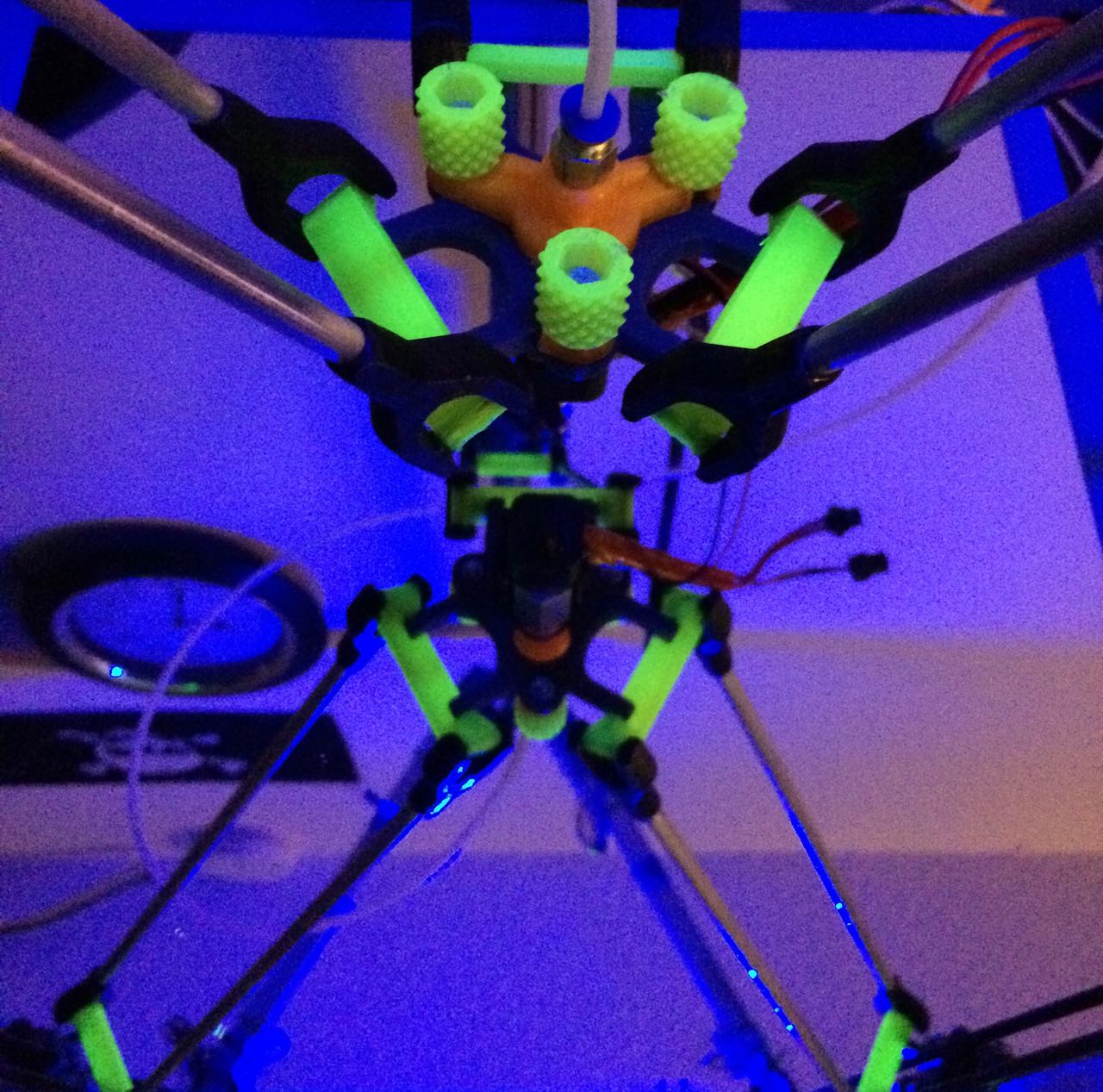
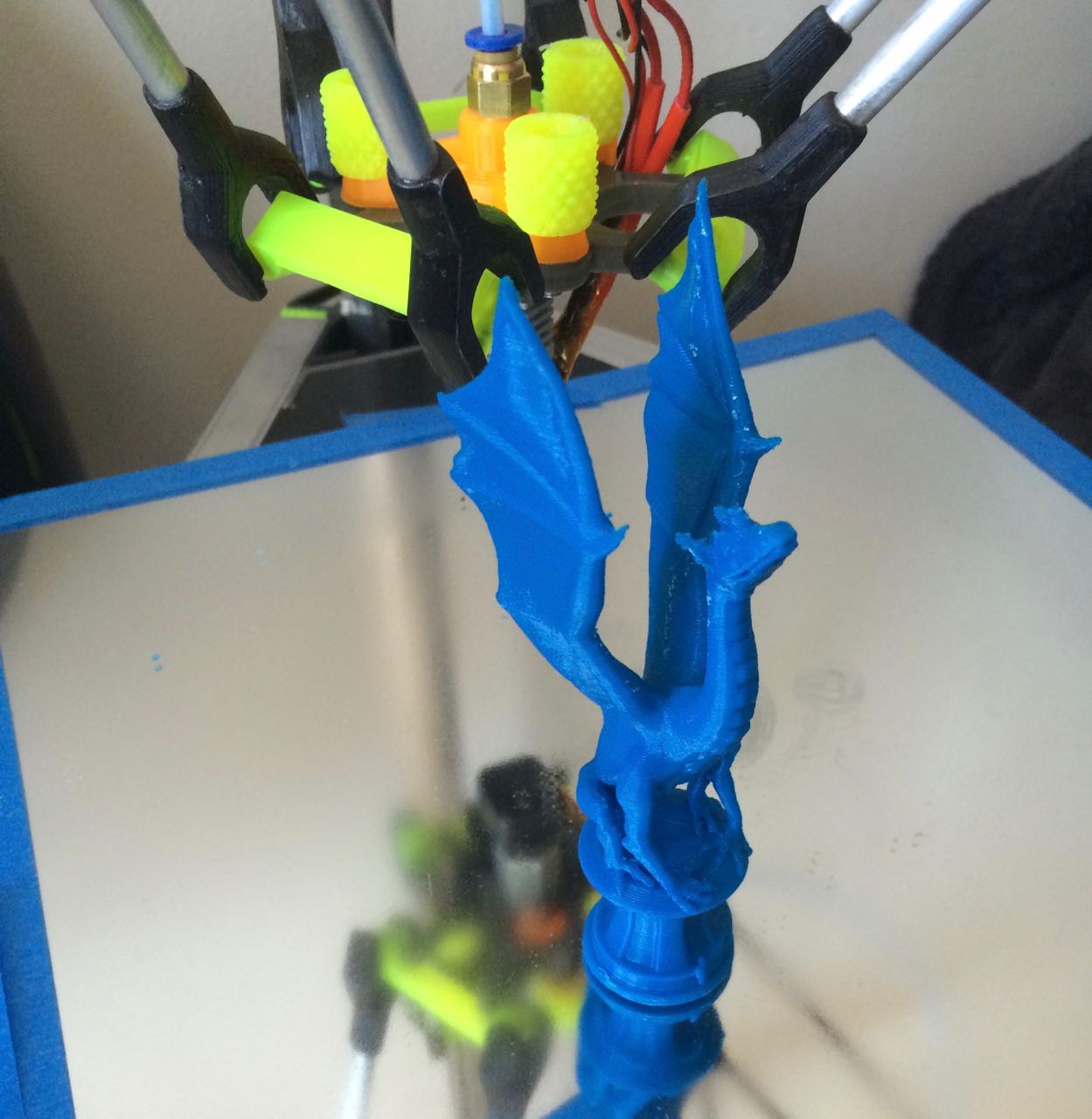
Here is the new effector assembled with the new swivel joints and push fit bowden connector, currently working with a Hexagon hotend:
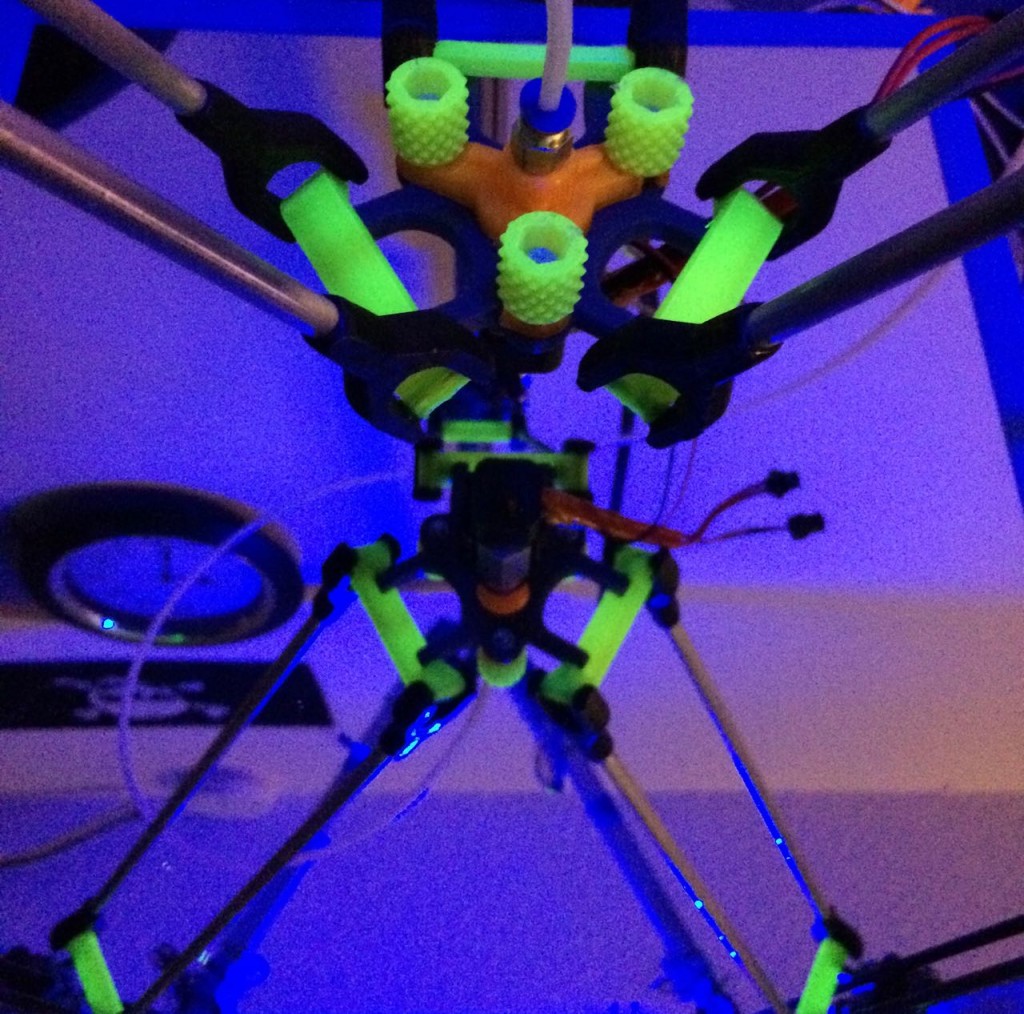
It works quite well, I am suitably impressed at what the machine can do and it’s printing speeds and quality.
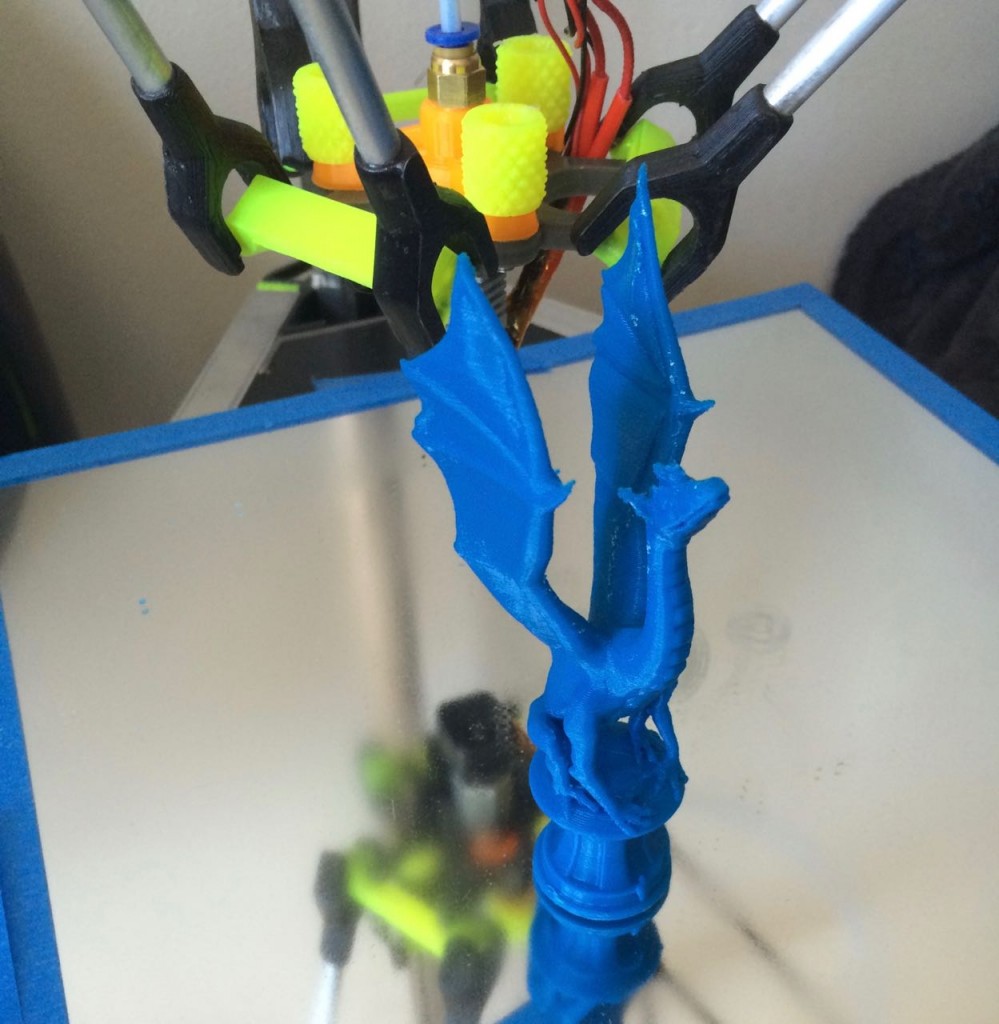
The above dragon was made with ABS and was my first major print since getting the machine calibrated.
I am fairly happy with the workings of the machine, although there is definitely room for improvement.
As a side project which is related to the needs of both the Kitchissippi Delta and the Gemini 3D printer, I designed a new bowden extruder system. Most of the filament pushers I found online where lacking in some way – either they didn’t use bearings that I have on hand (I have a LOT of 608zz bearings that I got for quite cheap) or they used what I felt to be an excessive amount of hardware. One big factor is that the push fit connectors I have on hand are all 3/8″ thread diameter with no internal guide path for the filament.
These connectors necessitate a larger hole than anyone else is using as well as a 3D printed guide to hold a short length of PTFE tube inside the connector to allow for smooth filament transmission.
This is the basic mechanism I came up with – it works well, even in it’s current rough design state:
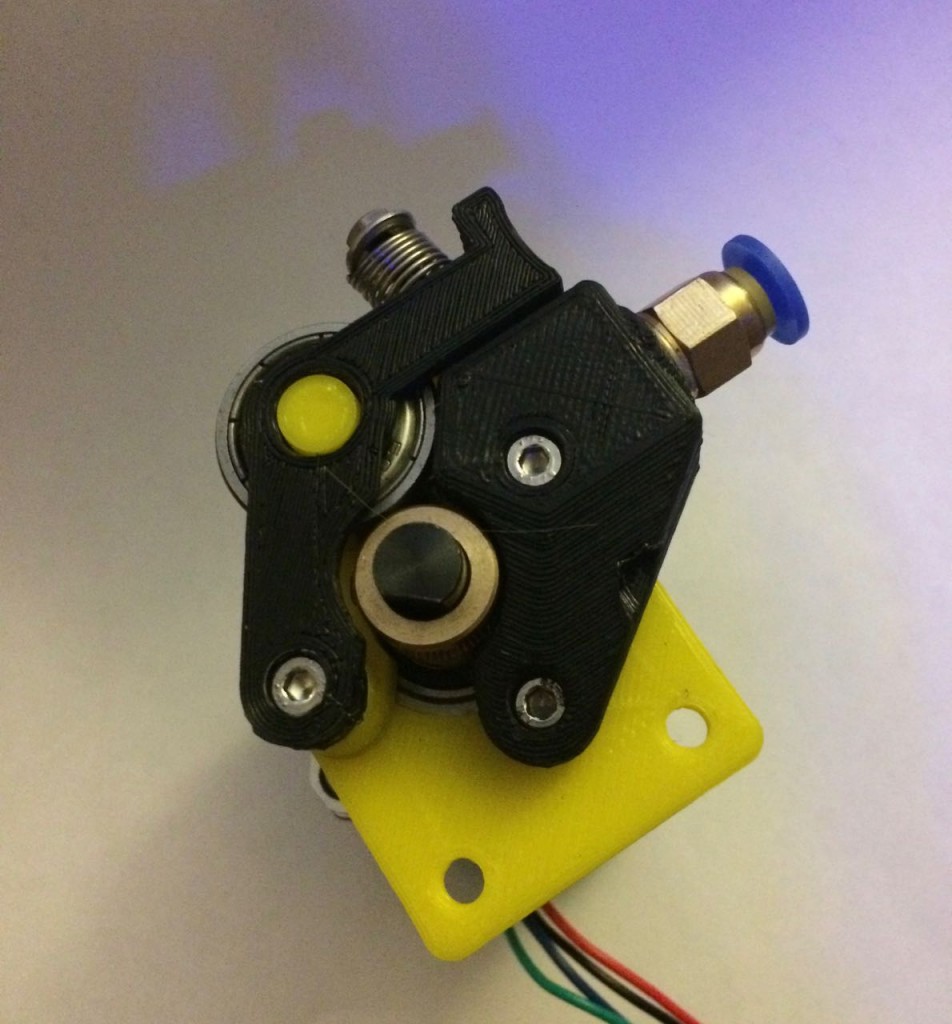
I have one of these zip-tied to the frame with a slightly too-long length of PTFE tube and it has been working very reliably for about 20 hours so far with ABS plastic. I’ve not tried it on PLA just yet as I’ve had some issues with the Hexagon and non-ABS plastics. I don’t see any particular reason the methods I am using should be incompatible with PLA however.
The mounting plate is just a dummy part acting as a placeholder for a proper mounting design. I plan to use this same extruder mechanism to get the Gemini 3D Printer up and running soon.
There are a few more new parts for the K03 that I am currently building to refine the linear mechanism and then I’ll get the new parts going for the Gemini to attach a pair of these – the current extruder motor mounts won’t be compatible. I didn’t have an extruder design when I came up with them initially, but I digress.
I should also note that all of the above printed parts where made on the current Kitchissippi Delta prototype.
Now that the entire delta mechanism and effector are satisfactory, my testing has shown that the linear carriage design is a bit wanting. The mechanism I designed over a year ago has too much flex in it which allows it to rock a little bit from the forces of pushing around the delta arms.
The net result of this is a very slight tilting of the effector while printing. In practice it’s had negligible effects on the ability of the machine to make an accurate print, but the overall quality is not quite up to par with my well-tuned Mendel.
Ultimately I’d like to have the whole machine parametric and scripted in OpenSCAD anyway, so making new linear carriages is a logical next step. A detailed description of the carriages will follow when they are complete and I have some more time.
The basic gist of the new design is that the carriages now have an offset between the upper and lower bearing clusters to improve stability and the spacers are now utilizing 17/32″ rubber plumbing washers which I hope will provide better adjustability and a tighter fit to the steel tubing without forcing the bearings to gouge it.
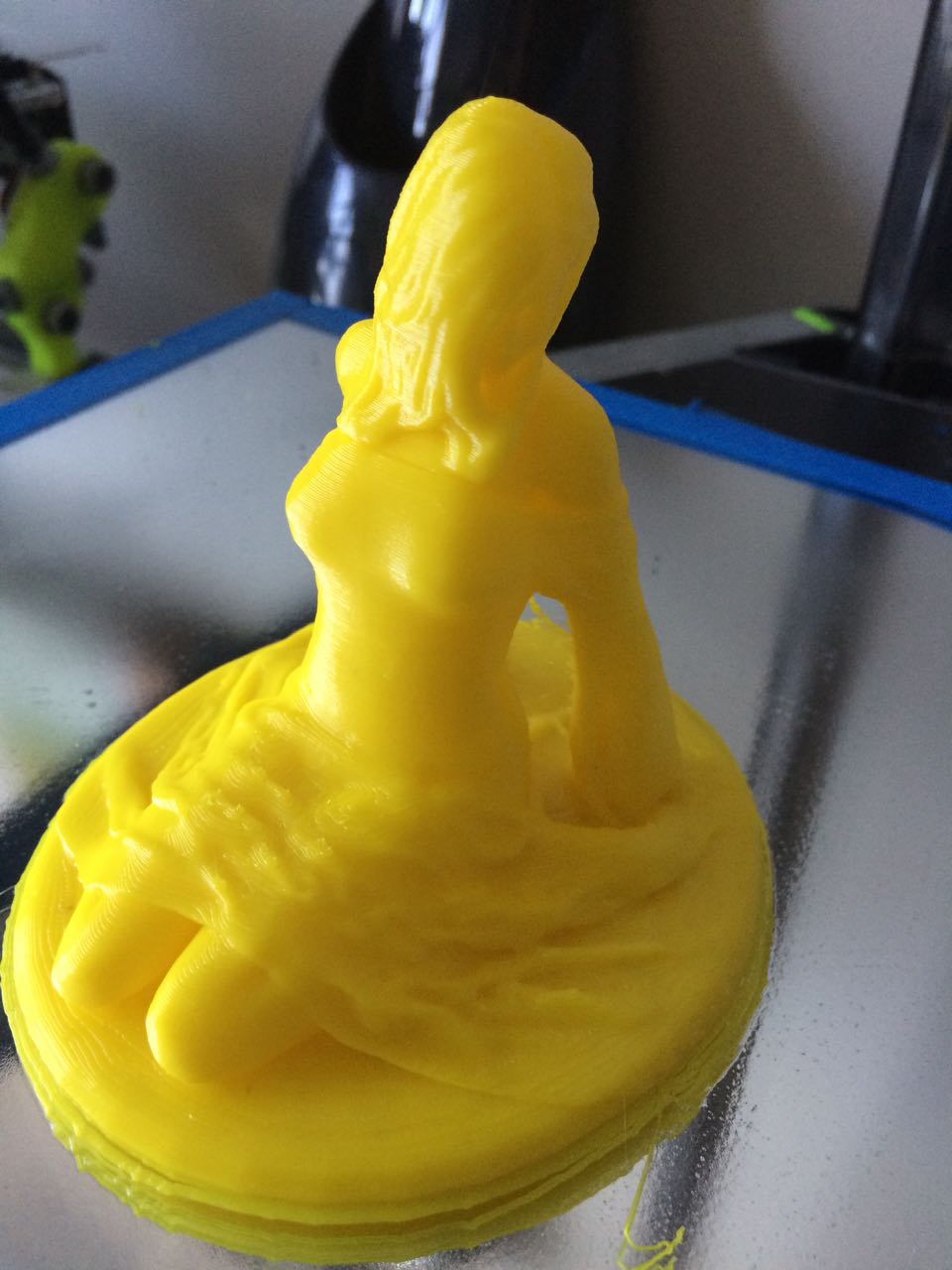
Finally, here’s another teaser print from the Kitchissippi-Delta in it’s current form:


Recent Comments