by B Cantin | Oct 31, 2015 | Gemini 3D Printer
Using OpenSCAD to recreate – and hopefully finally finish – the X-Carriage design has been proving beneficial.
It’s now much easier to programatically place the parts in a mockup of the assemblies and see how they’ll fit – and most importantly, I can make parametric adjustments to the placing and have the design automatically reshape itself to match.
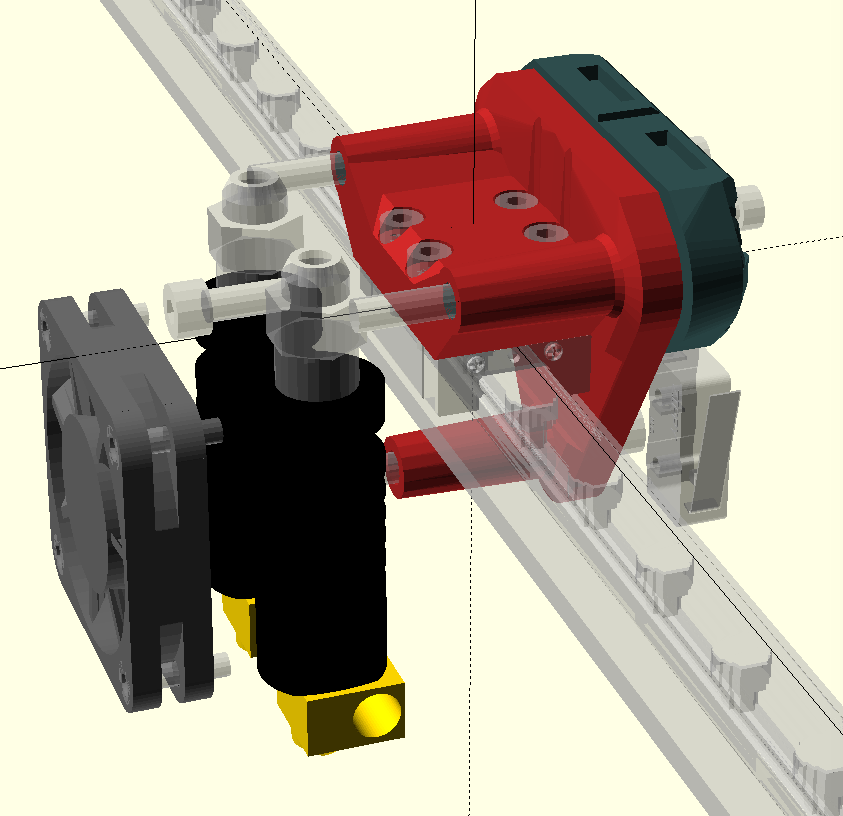
As you will see in the above rendered view of the X-Carriage, it’s starting to get pretty busy with components.
The goal here is to get everything to fit in as small a space as possible but still end up with printable parts.
What this partly entails is that components cannot be so close together that the ensuing printed part has thin walls or impossible overhangs
The belt clamp shown below is already pretty detailed with small design elements, these can be tricky for a 3D printer, so I’ve had to do some test prints to verify it is actually printable (which it is.)
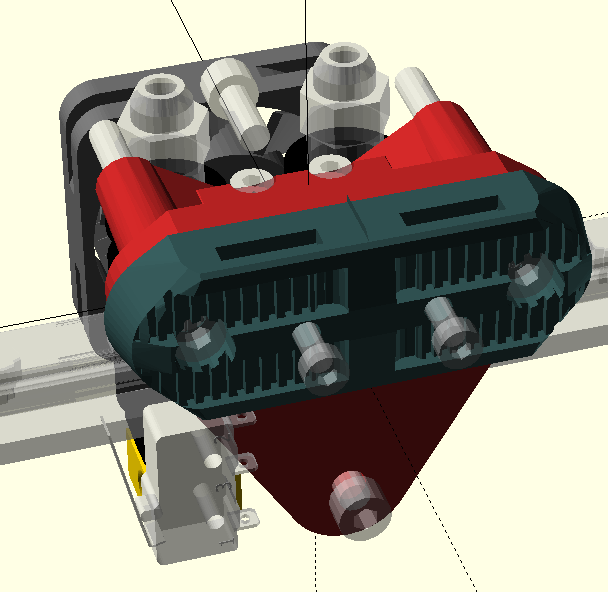
– There are still several mounting bolts not included within the rendered design and modules need to be written for rendering metric nuts and carving out insertion points for them.
– A 50mm blower fan needs to be somehow squeezed into this assembly as well, in order for the printer to also support print cooling for plastics like PLA.
– A more accurate (and parametric) version of the pneumatic pushfit connector needs to be drawn to give a better concept of the size and shape of the part.
– As described in my previous post regarding the X and Y axis end-stops, the X end-stop is shown in it’s approximate new location, the parts will need to be extended to have mount points for this switch.
I have plenty of ideas for how the cover for this assembly can be made, however they may change once all the hardware is accommodated for and the resulting shape can be determined.
by B Cantin | Oct 29, 2015 | Gemini 3D Printer
As I discussed in my previous post, work is being done towards creating an OpenSCAD parametric version of several key complicated assemblies within the Gemini 3D printer.
Things are going well – I have designed a basic syntax and part numbering system to keep assemblies organized and I have created the basis for a hardware utility library.
After recreating the current X-Carriage components in OpenSCAD, I performed some test prints of the parts to ensure the math was correct and the parts fit as intended.
While working on the new design I finally had to wrap my head around where the heck I was going to mount the X axis end-stop switch.
So much of my time was spent drawing and then redrawing concepts for the X-Carriage and Hotend-Assembly in Sketchup, I had really just put off and avoided the end-stop question.
The one thing that I had decided for certain was that the end-stop switch would be mounted on the X-Carriage and move with it in order to run the wiring through the whip harness rather than create another whip on the Y axis.
The trouble really revolved around two factors – where to even fit the switch with so many other bits of electronics built into the X-Carriage and Hotend-Assembly. It’s a pretty busy part with lots of external bits bolted and clamped into it – space is at a premium and the flow of heated air around the plastic is critical.
The second factor was the ability to make it adjustable – I was thinking along the lines that all axis have a simple thumb screw in an accessible location to allow for fine tuning of the home position.
This was becoming quite the brain teaser for me until I realized this afternoon that I could entirely eliminate the adjustment controls from the hardware and perform the adjustment with software.
I then realized I could do the same with the Y axis as well and both end-stops become limit-switches preventing a crash and allowing for homing of the machine.
The provisioning process is fairly simple – home the print head (the Gemini homes to MAX) and then measure the distance between the 300,300 point on the print bed and the primary nozzle in both the X and Y directions. These two numbers can be input into the firmware as a relative offset value. This process could be quickly repeated until an accurate value was determined through calibration.
When the print starts, it homes the print head and then print bed and then starts the print on the correct location on the print bed using the calibrated offset.
I believe it makes sense to still use a manual home adjustment on the Z axis because the print bed height is more likely to be variable. Changes in print bed coverings and materials can create large variances for the Z axis homing location. It will be less time consuming to use a spring-loaded thumb-screw rather than the software to make these frequent tuning changes.
For the X-Carriage end-stop, I am now planning to mount it below the belt line at the back of the X-Carriage. The switch holder will be integrated into the belt clamp component which is bolted to the X-Carriage base component with long M4 bolts.
by B Cantin | Oct 26, 2015 | Gemini 3D Printer
While reviewing certain aspects of the Revision 2 design for the Gemini 3D Printer a few minor design issues have come to light.
Unfortunately for this project, I was busy doing other things over the course of the Summer and needed to take a break from this machine.
The Devil is in the details they say and some of the design semantics of the X Carriage and Hotend Assembly have gone through many stages to evolve to their current state. While the modular design of the current components is pretty decent, I feel it can be made more elegant and functional with a re-working of how it assembles to the printer.
I spent a chunk of time over the past few months learning how to make complex parts within OpenSCAD to allow for easier revisions of designs and parametric settings to allow for hardware variations. This new skill will be used with the redesign of the Gemini X-Carriage and Hotend-Assembly.
The source and printable parts are being reorganized into sub-system components and a private JIRA instance is being created for task tracking and documentation. These steps will bring a more orderly development approach to the creation process.
Since the primary goal of this project is for me to have a machine with the size and capabilities of the Gemini, some of the focus will be changing in terms of the design scope for this prototype.
Enough will be changing that I suspect that this will become Revision 3 of the Gemini 3D Printer and Revision 2 will become just a stepping stone from the initial proof of concept prototype to a more complete system.
Recent Comments